---
title: "Simulate correlated movement"
description: "Simulating animal movement with correlated walks due to landscape resistance."
author:
- name: Kayla Kauffman
url: https://https://kmkauffm.github.io/
orcid: 0000-0002-4897-9428
format:
html:
toc: true
toc-location: left
message: false
warning: false
code-fold: false
code-tools: true
theme: sandstone
date: 2024-02-14
categories: [R, code, networks] # self-defined categories
image: corr_random_walk.png
draft: false # setting this to `true` will prevent your post from appearing on your listing page until you're ready!
---
```{r}
#| echo: false
#| message: false
library(tidyverse)
library(terra)
```
## Introduction
Animal movement is complex to simulate because each step is correlated with the previous step. Simulating movement for a population of animals is further complicated because movements can be correlated, meaning animals follow paths, and the landscape might have resistance (e.g. step hillsides that are difficult to walk along). The idea to simulate walks with resistance largely stems from the defunct rpackage `SimRiv`.
## Simple movements
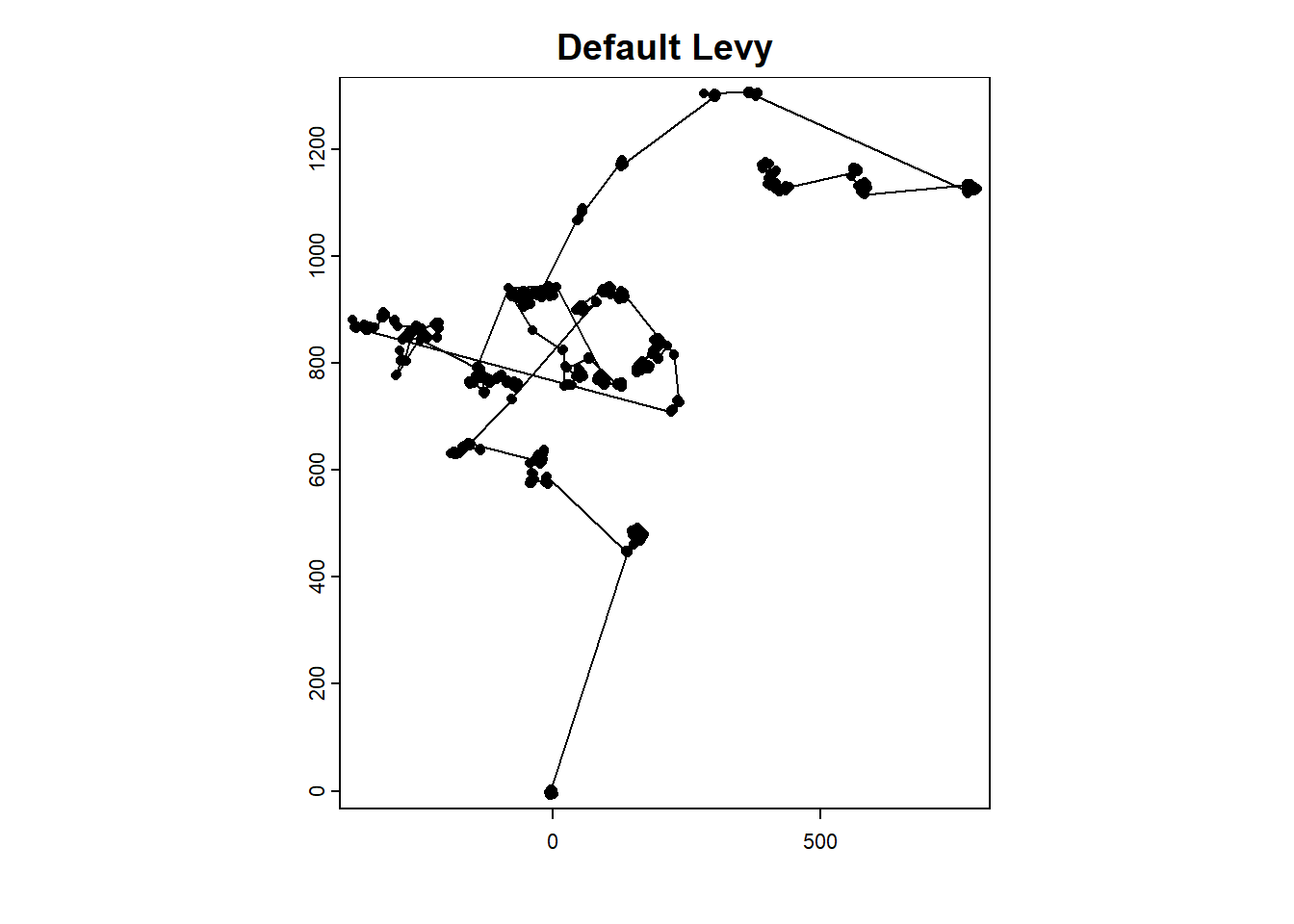
The start to the more complex animal movements is based off of a Levy-like walk.
```{r}
walk_levy <- function(ts=1000, mu = 2, x0=c(0,0)){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## x0 = starting location
n = ts
## set up turning angles
ang <- runif(n - 1, -pi, pi)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting location
si = x0[1]
co = x0[2]
for (i in 2:n) {
## step length
v = 1 * (runif(1)^(1/(1 - mu)))
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
## update location
si = c(si, si1)
co = c(co, co1)
}
## return
vect(cbind(si,co), "lines")
}
## default levy
trial <- walk_levy(ts=1000, mu = 2, x0=c(0,0))
plot(trial, main = "Default Levy");points(trial)
## shorten step length with mu
trial <- walk_levy(ts=1000, mu = 0.5, x0=c(0,0))
plot(trial, main = "Shortened steps Levy");points(trial)
```
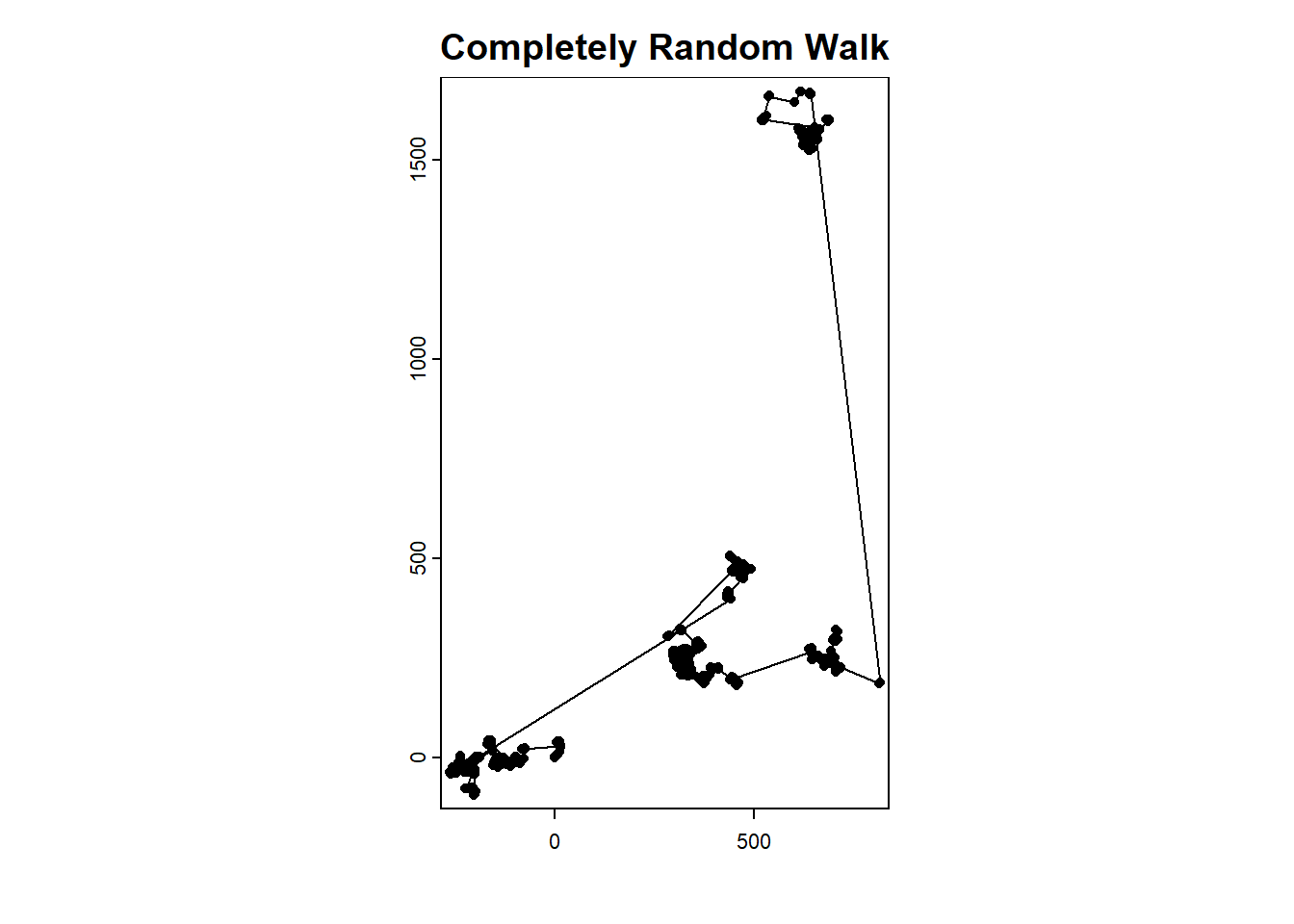
The next step is to add correlation to the turning angles.
```{r}
walk_corr <- function(ts=1000, mu = 2, r = 0, x0=c(0,0)){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## r = The concentration parameter for wrapped normal distribution of turning angles (0=random, 1=straight line)
## x0 = starting location
n = ts
## set up turning angles --- UPDATED THIS PART
ang <- CircStats::rwrpnorm(n-1, 0, r)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting location
si = x0[1]
co = x0[2]
for (i in 2:n) {
## step length
v = 1 * (runif(1)^(1/(1 - mu)))
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
## update location
si = c(si, si1)
co = c(co, co1)
}
## return
vect(cbind(si,co), "lines")
}
## default random
trial <- walk_corr(ts=1000, mu = 2, r = 0, x0=c(0,0))
plot(trial, main = "Completely Random Walk");points(trial)
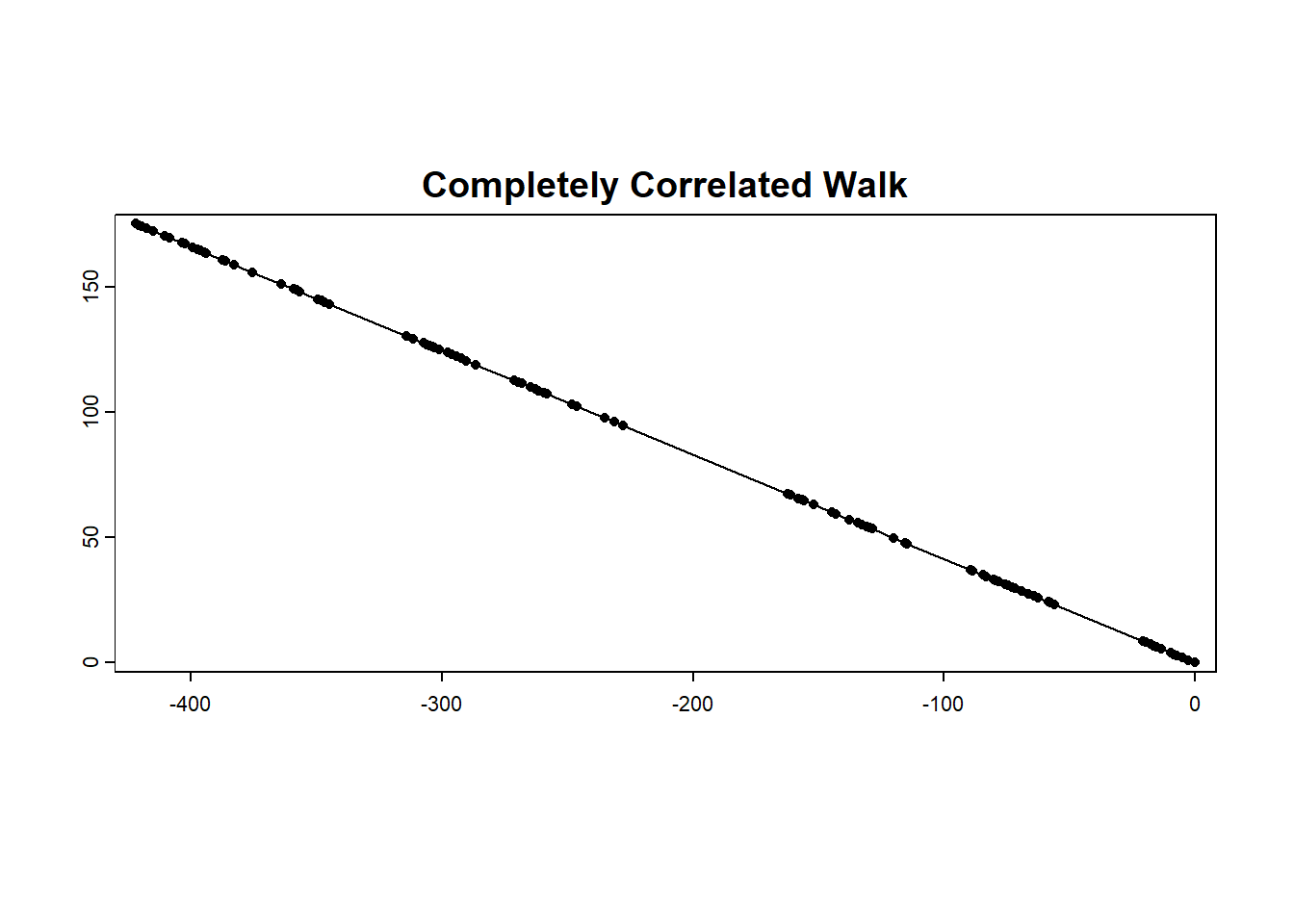
## completely straight
trial <- walk_corr(ts=100, mu = 2, r = 1, x0=c(0,0))
plot(trial, main = "Completely Correlated Walk");points(trial)
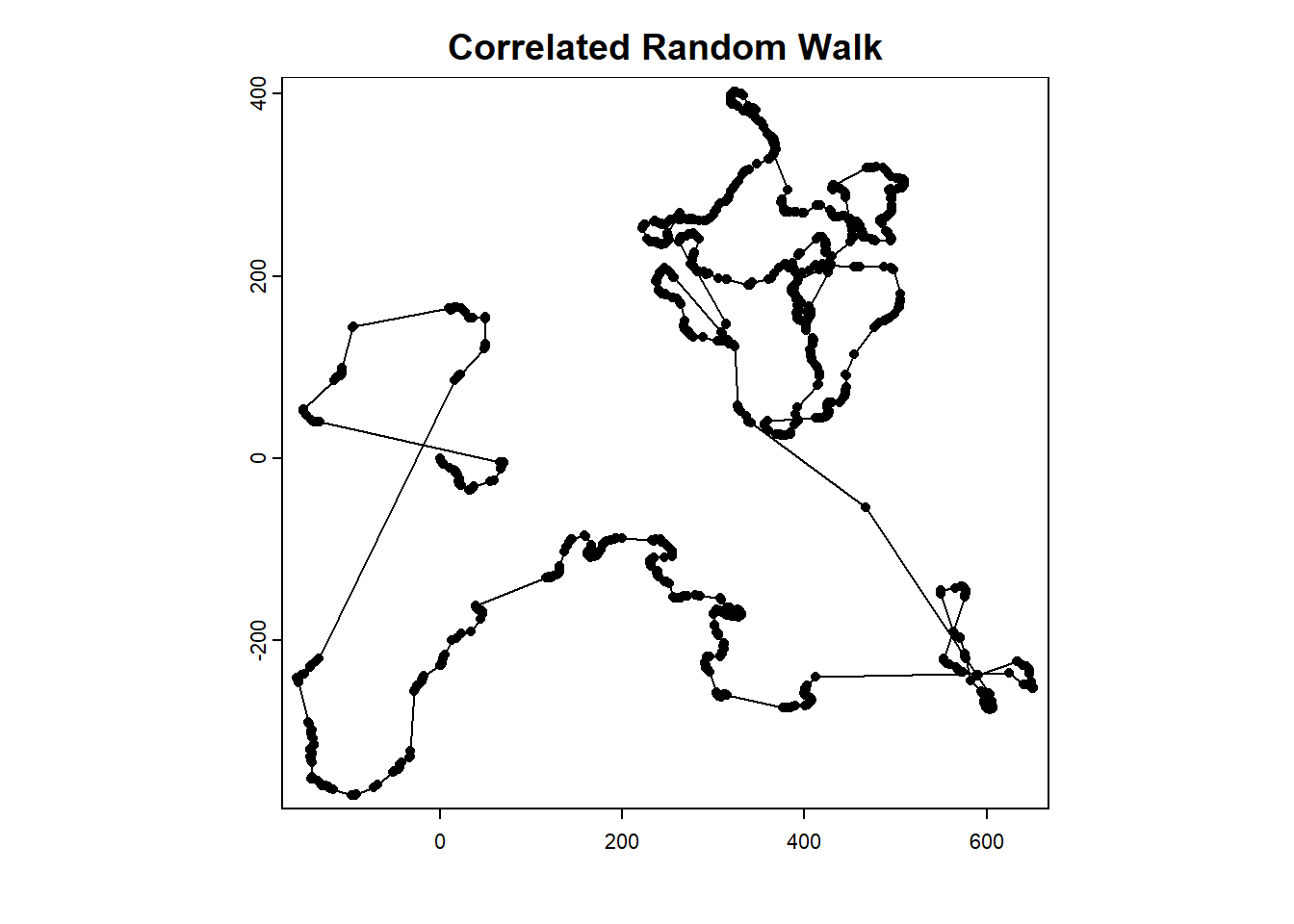
## correlated random walk
trial <- walk_corr(ts=1000, mu = 2, r = 0.9, x0=c(0,0))
plot(trial, main = "Correlated Random Walk");points(trial)
```
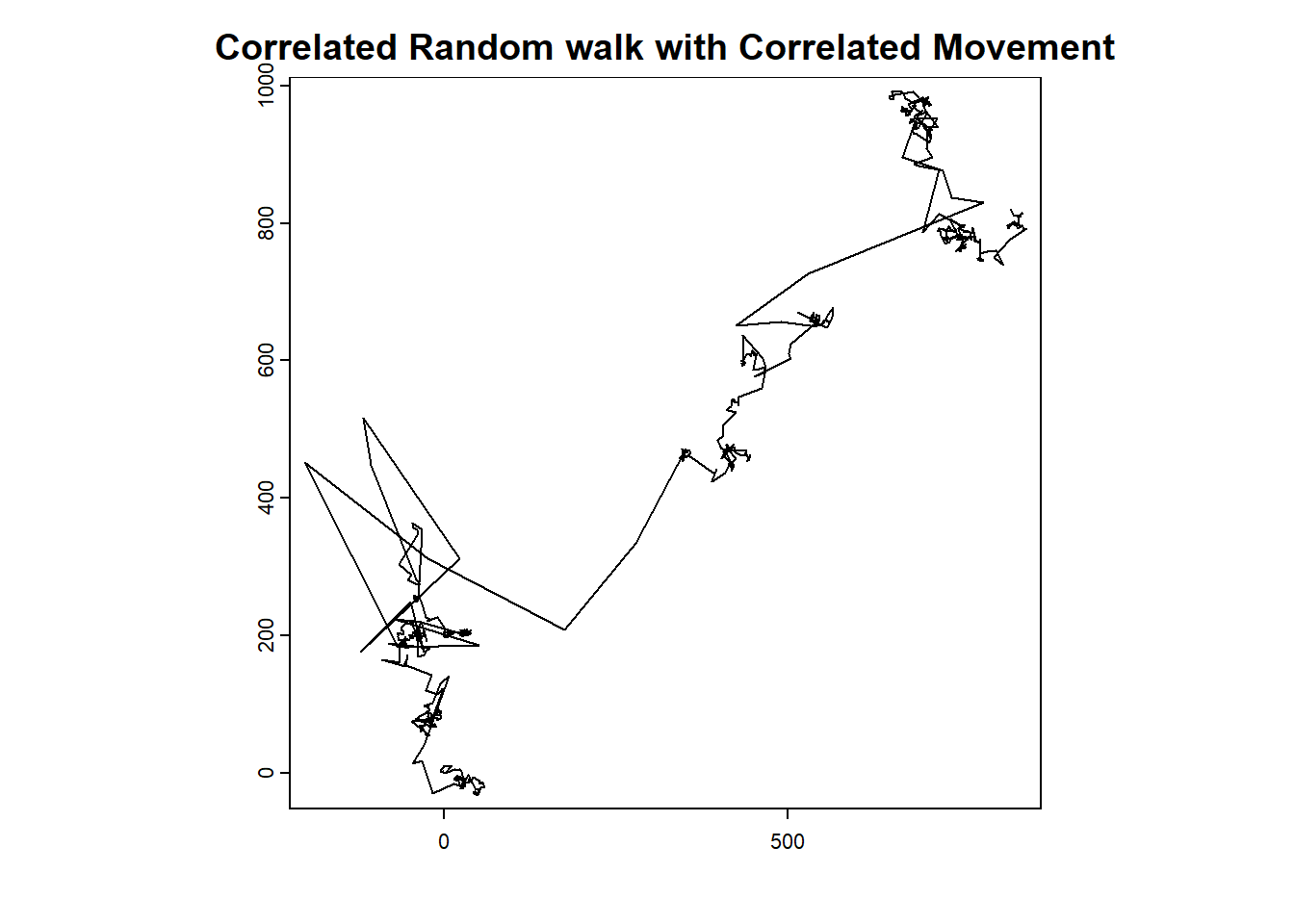
Then add correlation to the step lengths
```{r}
walk_corr <- function(ts=1000, mu = 2, r = 0, x0=c(0,0)){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## r = The concentration parameter for wrapped normal distribution of turning angles (0=random, 1=straight line)
## x0 = starting location
n = ts
## set up turning angles
ang <- CircStats::rwrpnorm(n-1, 0, r)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting step length ## --- UPDATED THIS PART
v = mu
## starting location
si = x0[1]
co = x0[2]
for (i in 2:n) {
## step length
v = rweibull(1, shape = 1, scale = v)+1 ## --- UPDATED THIS PART
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
## update location
si = c(si, si1)
co = c(co, co1)
}
## return
vect(cbind(si,co), "lines")
}
## default completely random angle
trial <- walk_corr(ts=1000, mu = 2, r = 0, x0=c(0,0))
plot(trial, main = "Correlated Random walk with Correlated Movement")
```
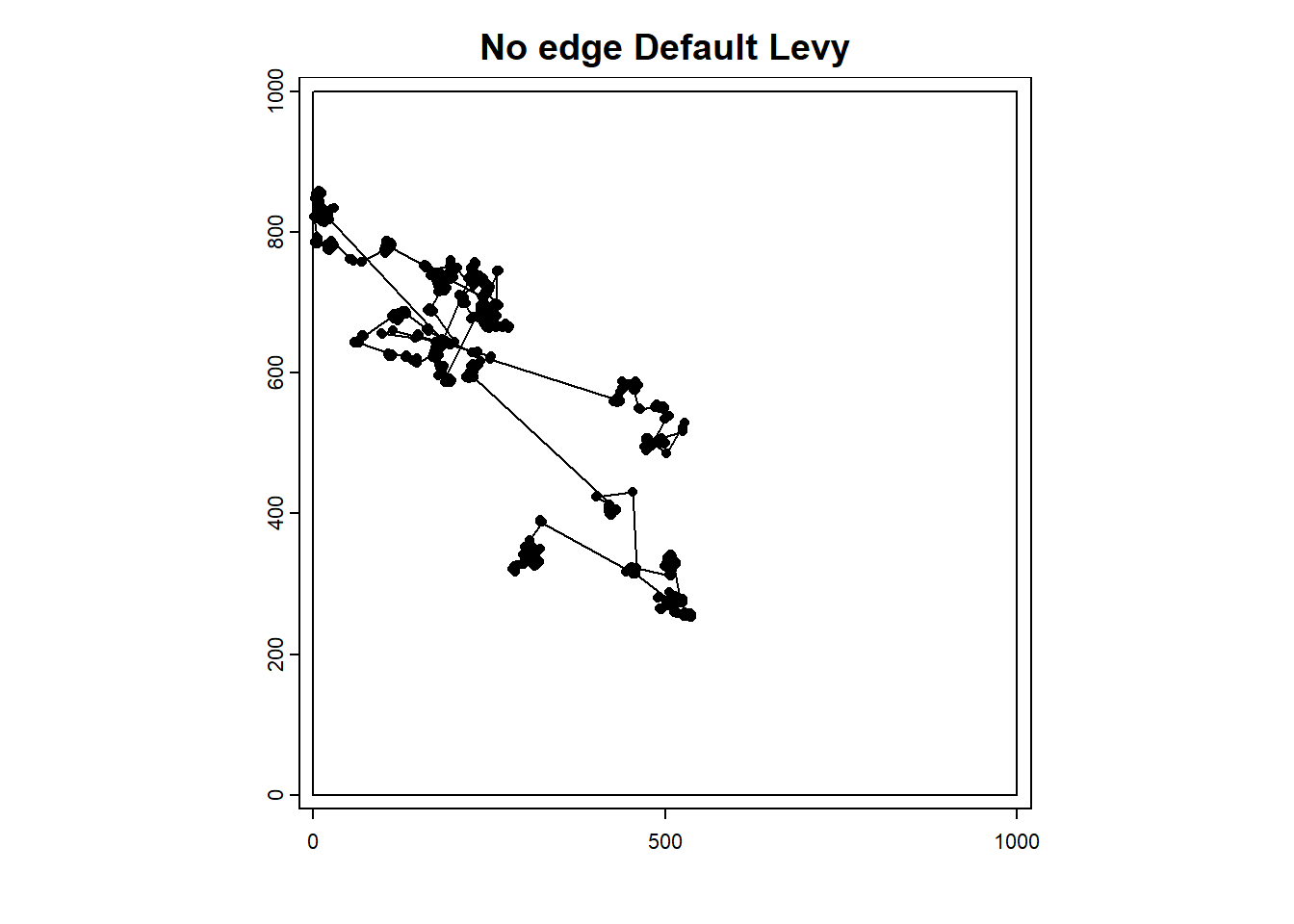
The last step, which became clear later, was to keep the simulated individuals in the area of interest, the easiest way to do this is using the extent of the resistance raster.
```{r}
walk_levy <- function(ts=1000, mu = 2, x0=c(0,0),
resistance){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## x0 = starting location
## resistance = rast
n = ts
## set up turning angles
ang <- runif(n - 1, -pi, pi)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting location
si = x0[1]
co = x0[2]
for (i in 2:n) {
## step length
v = 1 * (runif(1)^(1/(1 - mu)))
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
##check in bounds ## --- UPDATED THIS PART
if (si1 < 0 | si1 > ext(resistance)[2] |
co1 < 0 | co1 > ext(resistance)[4] ) {
## don't move if outside bounds
si1 = si[i-1]
co1 = co[i-1]
}
## update location
si = c(si, si1)
co = c(co, co1)
}
## return
vect(cbind(si,co), "lines")
}
walk_corr <- function(ts=1000, mu = 2, r = 0, x0=c(0,0),
resistance){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## r = The concentration parameter for wrapped normal distribution of turning angles (0=random, 1=straight line)
## x0 = starting location
## resistance = rast
n = ts
## set up turning angles
ang <- CircStats::rwrpnorm(n-1, 0, r)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting step length
v = mu
## starting location
si = x0[1]
co = x0[2]
for (i in 2:n) {
## step length
v = rweibull(1, shape = 1, scale = v)+1
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
##check in bounds ## --- UPDATED THIS PART
if (si1 < 0 | si1 > ext(resistance)[2] |
co1 < 0 | co1 > ext(resistance)[4] ) {
## don't move if outside bounds
si1 = si[i-1]
co1 = co[i-1]
}
## update location
si = c(si, si1)
co = c(co, co1)
}
## return
vect(cbind(si,co), "lines")
}
## resistance raster ( with no resistance added)
r <- rast(extent = c(xmin = 0, xmax = 1000, ymax = 0, ymin = 1000),
resolution = 1)
## default levy
trial <- walk_levy(ts=1000, mu = 2, x0=c(500,500),
resistance = r)
plot(ext(r), main="No edge Default Levy");lines(trial);points(trial)
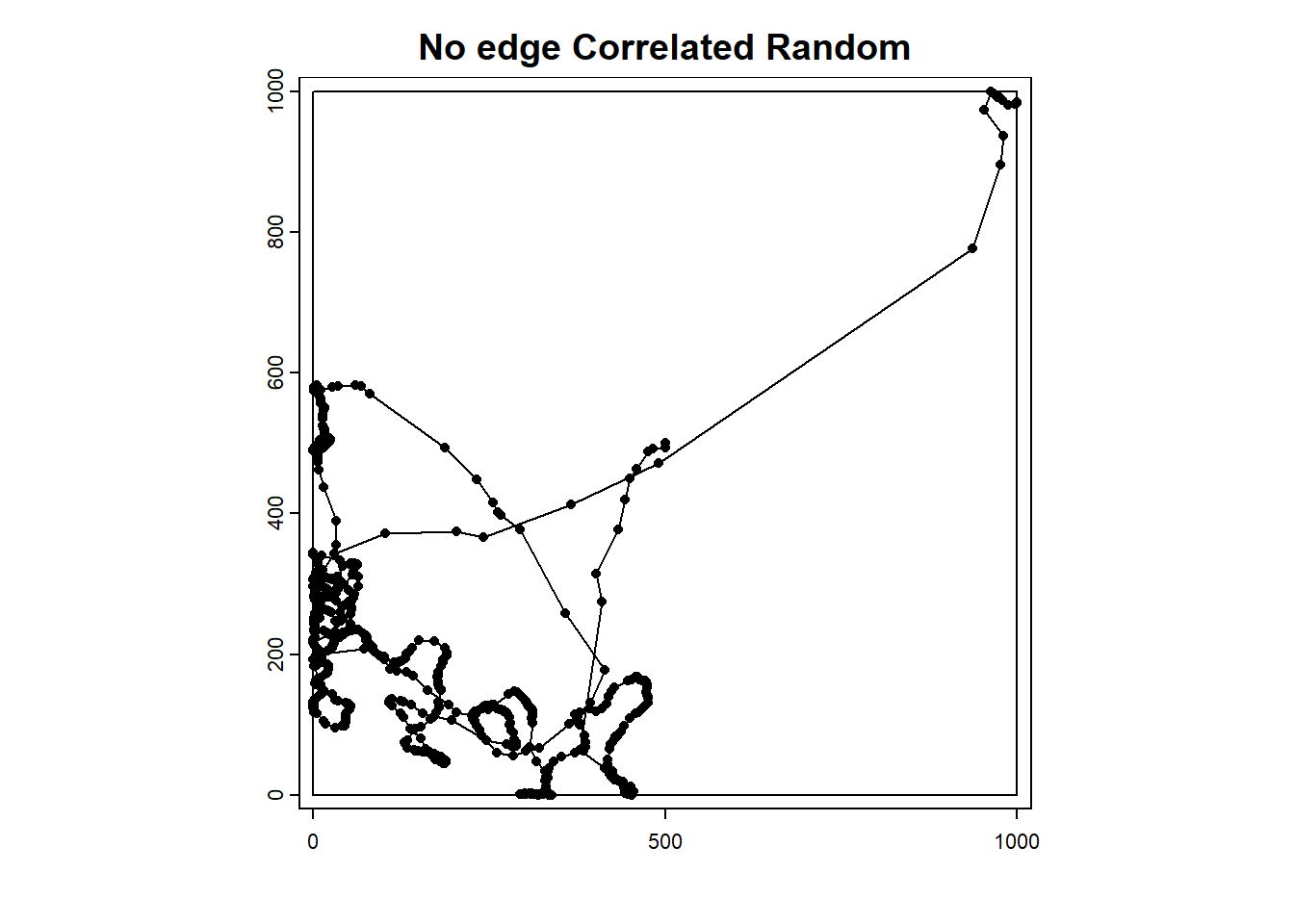
## correlated random
trial <- walk_corr(ts=1000, mu = 2, r = 0.9, x0=c(500,500),
resistance = r)
plot(ext(r), main = "No edge Correlated Random");lines(trial);points(trial)
```
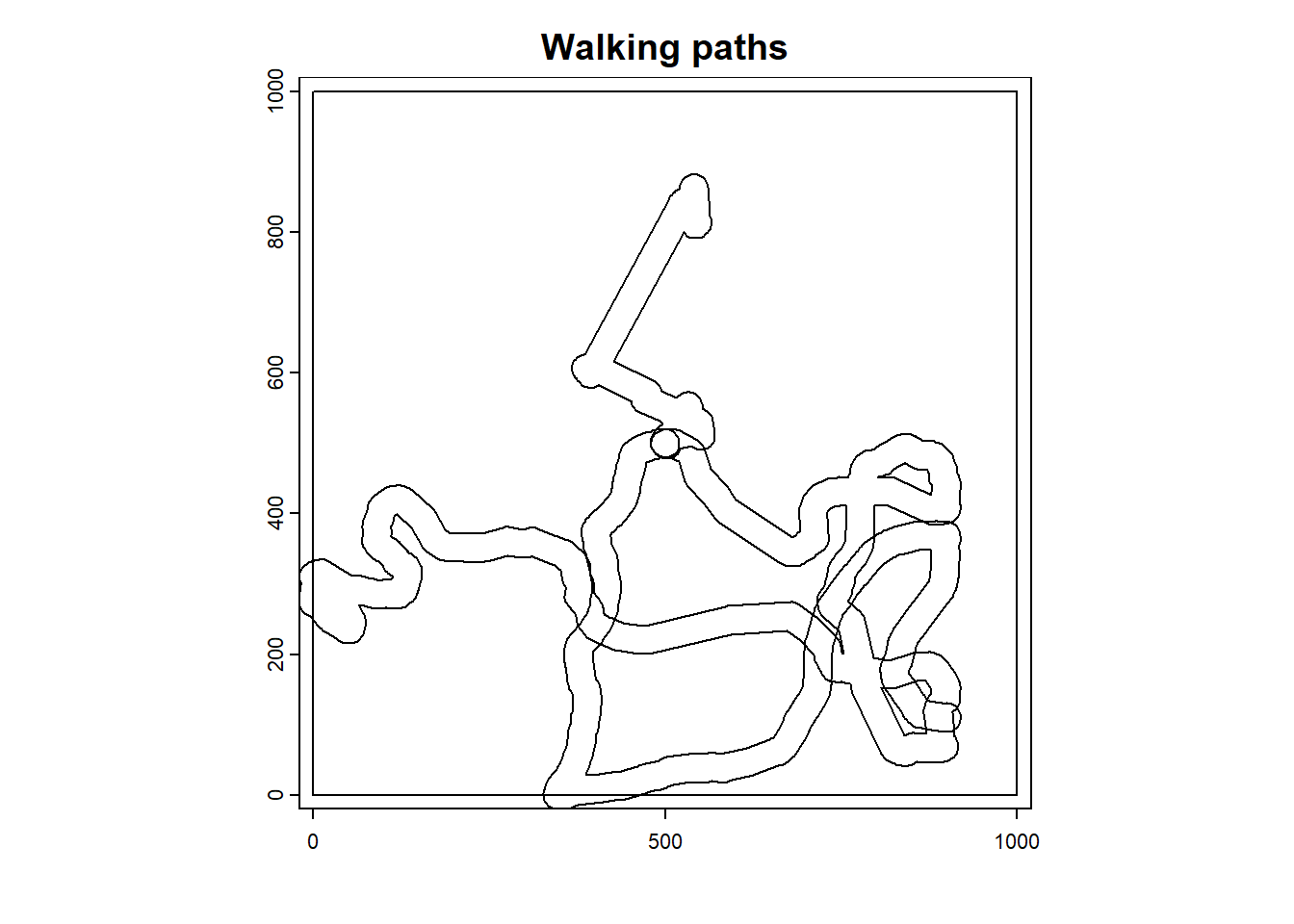
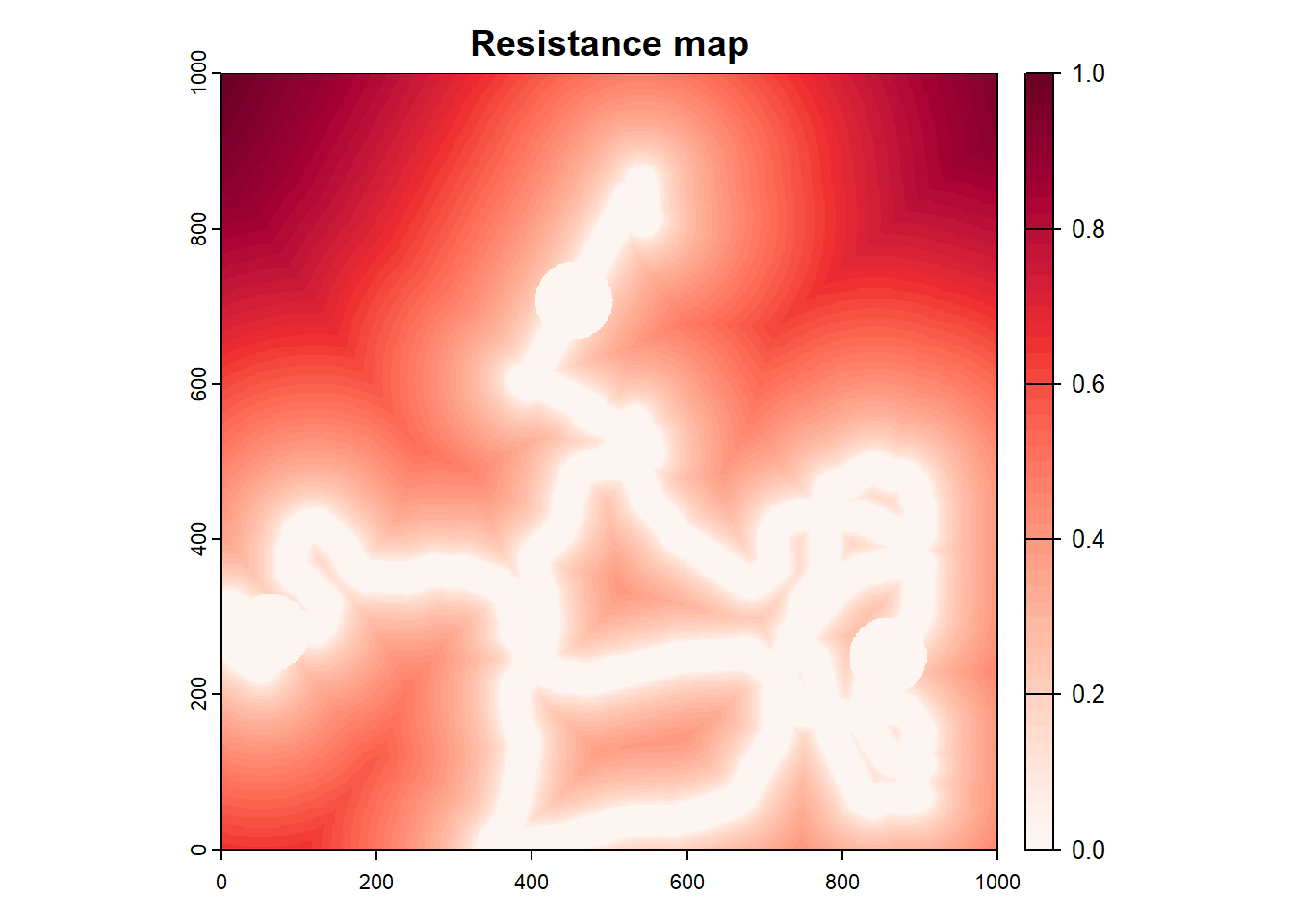
## Resistance raster
Resistance could be any features scaled \[0,1\]. For example the slope of an area with steep places \~1 and flat, easy to move places \~0. Paths should have the least resistance so that animals preferentially move along the path.
```{r}
## use a seed so get repeatable landscape
set.seed(567)
### empty raster of study area
r <- rast(extent = c(xmin = 0, xmax = 1000, ymax = 0, ymin = 1000),
resolution = 1)
## slightly smaller raster for paths to fall inside of
r2 <- rast(extent = c(xmin = 100, xmax = 900, ymax = 100, ymin = 900),
resolution = 1)
## make paths because walks will follow paths
p1 <- walk_corr(ts=500, mu = 5, r = 0.99, x0=c(500,500), resistance = r2)
p2 <- walk_corr(ts=500, mu = 5, r = 0.95, x0=c(500,500), resistance = r2)
p3 <- walk_levy(ts=100, mu = 2, x0=c(500,500), resistance = r2)
resistanceshape <- union(p1, p2)
resistanceshape <- union(resistanceshape, p3)
resistanceshape <- buffer(resistanceshape, 20)
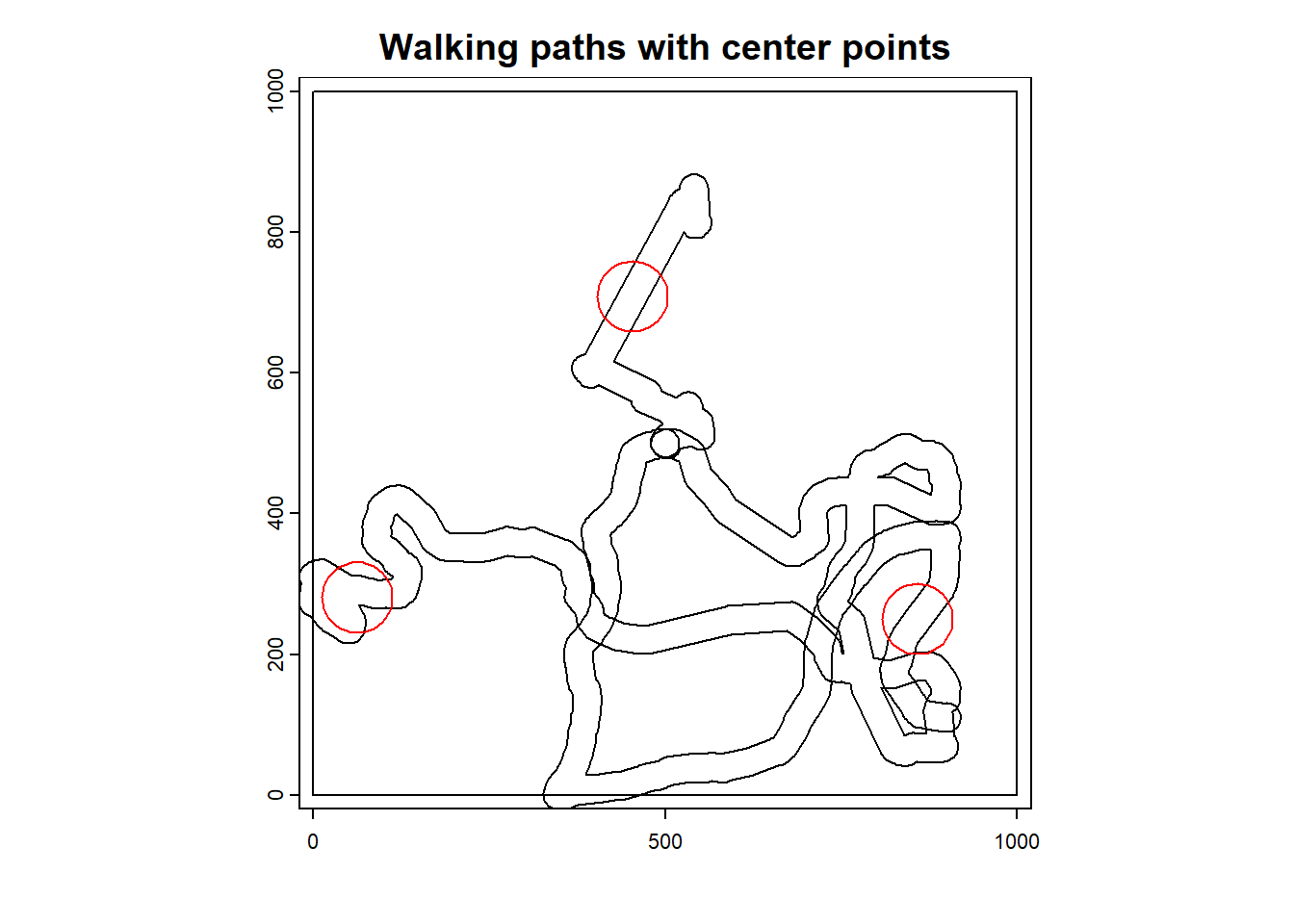
plot(ext(r), main = "Walking paths");lines(resistanceshape)
rm(r2, p1, p2, p3)
## add central area with low resistence
cent <- centroids(resistanceshape, inside=T) %>%
buffer(50)
plot(ext(r), main = "Walking paths with center points");lines(resistanceshape);lines(cent, col="red")
## build resistance raster using the paths
terra::values(r) <- NA
res_rast <- rasterize(resistanceshape, r)
res_rast <- distance(res_rast)
## make the low friction paths narrower
res_rast <- sqrt(res_rast)
## add the central areas with no resistance
cent <- rasterize(cent, r)
res_rast[cent==1] = 0
## scale [0,1]
terra::values(res_rast) <- terra::values(res_rast)/max(terra::values(res_rast))
## plot it
plot(res_rast, main = "Resistance map", col=hcl.colors(50, palette = "Reds", rev = T))
rm(resistanceshape, r, cent)
```
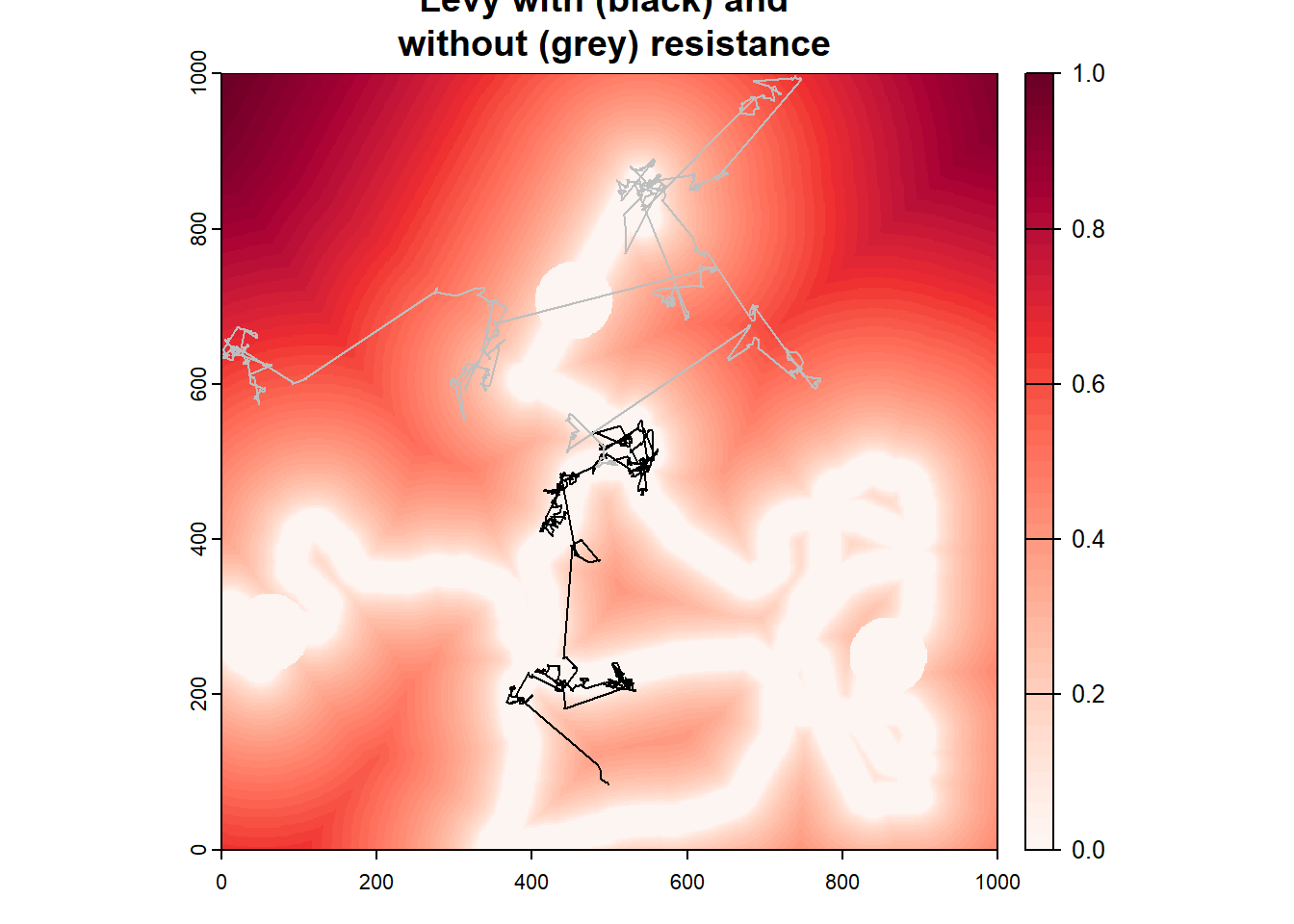
## Movement with landscape resistance
Now update the walk functions again so that downhill steps always happen and uphillsteps have a low probability of occuring.
```{r}
walk_levy_resistance <- function(ts=1000, mu = 2, x0=c(0,0),
resistance){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## x0 = starting location
## resistance = rast
n = ts
## set up turning angles
ang <- runif(n - 1, -pi, pi)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting location
si = x0[1]
co = x0[2]
## track resistance at each location ## --- UPDATED THIS PART
res = terra::extract(resistance, rbind(c(si, co)))[[1]]
for (i in 2:n) {
## step length
v = 1 * (runif(1)^(1/(1 - mu)))
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
##check in bounds
if (si1 < 0 | si1 > ext(resistance)[2] |
co1 < 0 | co1 > ext(resistance)[4] ) {
## don't move if outside bounds
si1 = si[i-1]
co1 = co[i-1]
res1 = res[i-1]
} else { ## --- UPDATED THIS PART
## resistance @ location
res1 = terra::extract(resistance, rbind(c(si1, co1)))[[1]]
##small probability move regardless of resistance
pmove = rbinom(1, 1, 0.25) == 1 # move about 25% of time
## don't move if res==1
if (res1 == 1 | is.na(res1)) {
si1 = si[i-1]
co1 = co[i-1]
res1 = res[i-1]
## move if resistance at new location lower or move anyways
} else if (res1 <= res[i-1] | pmove) {
si1 = si1
co1 = co1
res1 = res1
## otherwise stay at current location
} else {
si1 = si[i-1]
co1 = co[i-1]
res1 = res[i-1]
}
} ## --- End update
## update location
si = c(si, si1)
co = c(co, co1)
res = c(res, res1)
}
## return
vect(cbind(si,co), "lines")
}
trial_res <- walk_levy_resistance(ts=1000, mu = 2, x0=c(500,500),
resistance=res_rast)
trial_nores <- walk_levy(ts=1000, mu = 2, x0=c(500,500),
resistance=res_rast)
plot(res_rast, col=hcl.colors(50, palette = "Reds", rev = T),
main = "Levy with (black) and \n without (grey) resistance");
lines(trial_res, col="black");lines(trial_nores, col="grey")
```
```{r}
walk_corr_resistance <- function(ts=1000, mu = 2, r = 0, x0=c(0,0),
resistance){
## ts = number of relocations
## mu = exponent of levy distribution (impacts step length)
## r = The concentration parameter for wrapped normal distribution of turning angles (0=random, 1=straight line)
## x0 = starting location
## resistance = rast
n = ts
## set up turning angles
ang <- CircStats::rwrpnorm(n-1, 0, r)
ang = cumsum(c(runif(1, 0, 2 * pi), ang))
## starting step length
v = mu
## starting location
si = x0[1]
co = x0[2]
## track resistance at each location ## --- UPDATED THIS PART
res = terra::extract(resistance, rbind(c(si, co)))[[1]]
for (i in 2:n) {
## step length
v = rweibull(1, shape = 1, scale = v)+1
## propose a new location
si1 = si[i-1]+cumsum(v * sin(ang[i]))
co1 = co[i-1]+cumsum(v * cos(ang[i]))
##check in bounds
if (si1 < 0 | si1 > ext(resistance)[2] |
co1 < 0 | co1 > ext(resistance)[4] ) {
## don't move if outside bounds
si1 = si[i-1]
co1 = co[i-1]
} else { ## --- UPDATED THIS PART
## resistance @ location
res1 = terra::extract(resistance, rbind(c(si1, co1)))[[1]]
##small probability move regardless of resistance
pmove = rbinom(1, 1, 0.01) == 1 # move about 25% of time
## don't move if res==1
if (res1 == 1 | is.na(res1)) {
si1 = si[i-1]
co1 = co[i-1]
res1 = res[i-1]
## move if resistance at new location lower or move anyways
} else if (res1 <= res[i-1] | pmove) {
si1 = si1
co1 = co1
res1 = res1
## otherwise stay at current location
} else {
si1 = si[i-1]
co1 = co[i-1]
res1 = res[i-1]
}
} ## --- End update
## update location
si = c(si, si1)
co = c(co, co1)
res = c(res, res1)
}
## return
vect(cbind(si,co), "lines")
}
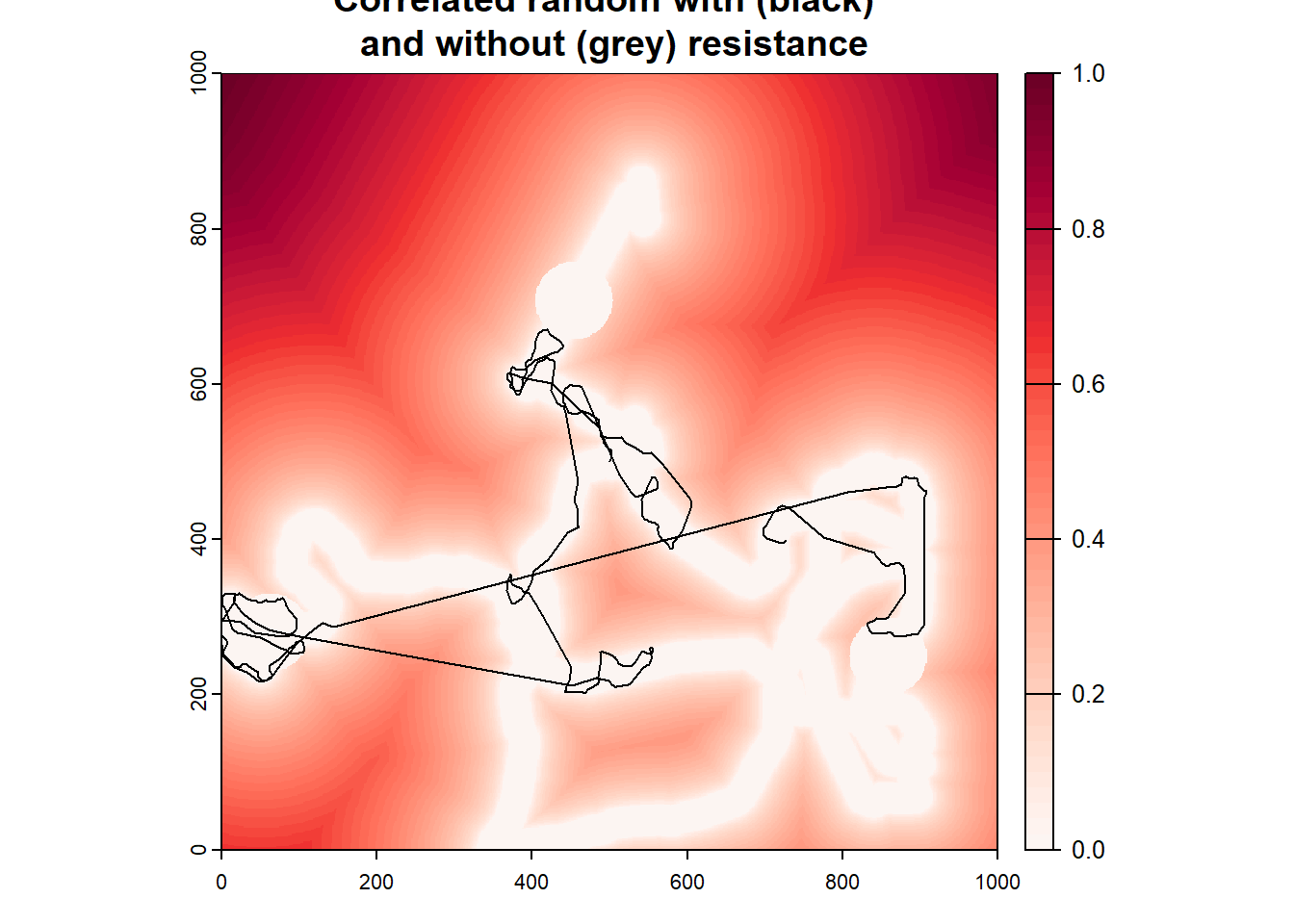
trial_res <- walk_corr_resistance(ts=1000, mu = 1.8, r=0.9,
x0=c(500,500),
resistance=res_rast)
trial_nores <- walk_corr(ts=1000, mu = 1.8, r=0.9,
x0=c(500,500),
resistance=res_rast)
plot(res_rast, col=hcl.colors(50, palette = "Reds", rev = T),
main = "Correlated random with (black) \n and without (grey) resistance");
lines(trial_res, col="black")#;lines(trial_nores, col="grey")
```
### To do
- [ ] Remove longer steps so can't jump between paths\
- [ ] Add in running multiple sims at once
- [ ] Adjust cent areas vs track area movement?